- ホーム
- HIDEKI SHIMIZU
HIDEKI SHIMIZU
-

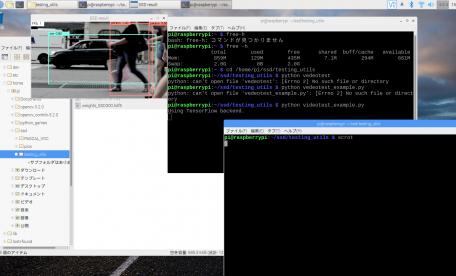
物体追跡カメラの作り方 for ラズパイ
-

サクッとLINE通知できる監視カメラの作り方。対動物観察にも。
-
How to use AI to make Sudoku solver happen quickly
-

強化学習をテトリス・マリオで試す方法
-

AI開発で精度が出ないときに真っ先に疑う箇所はここだ!
-
YOLO V5 をGoogle Colabで学習する方法
-
YOLO V5の学習方法が簡単すぎる!
-
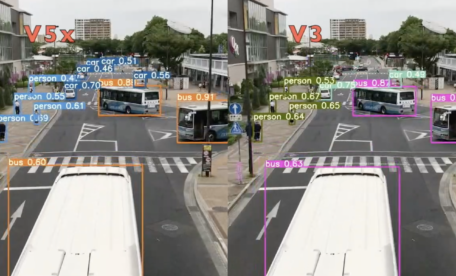
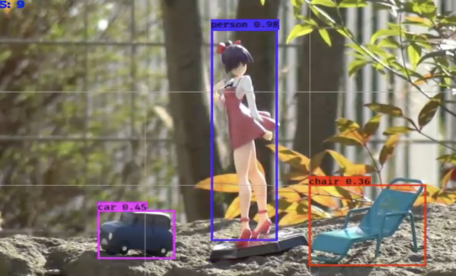
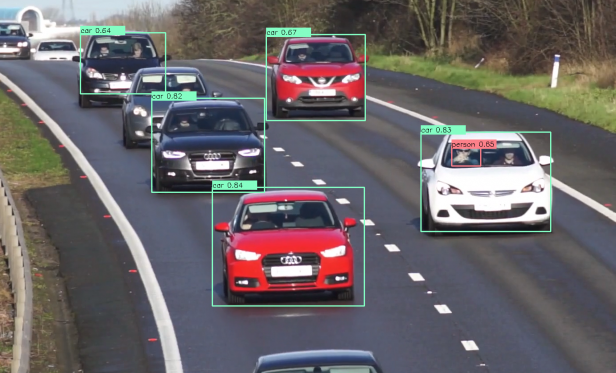
YOLO V5(V3との比較有)を簡単サクッと試す!
-
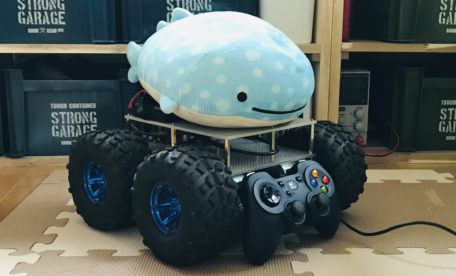
外でも動く遠隔操作AIロボットを作ろう part03(joystick編)
-

外でも動く遠隔操作AIロボットを作ろう part02(arduino編)
-
Jetson nano keras-yolo v3 setup
-
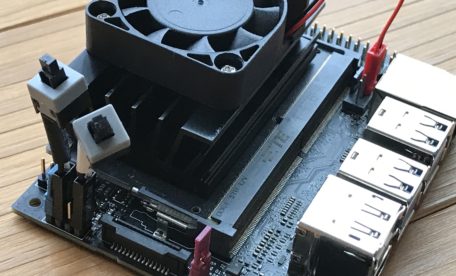
即できる!初めてのJetson nanoでAI入門:DeepStream編
-
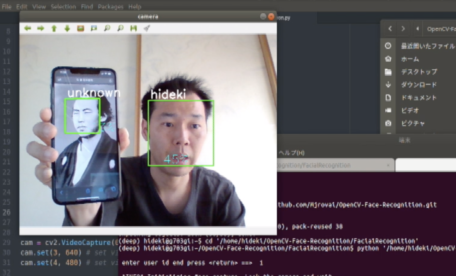
簡単に個人認証:OpenCV-Face-Recognition
-
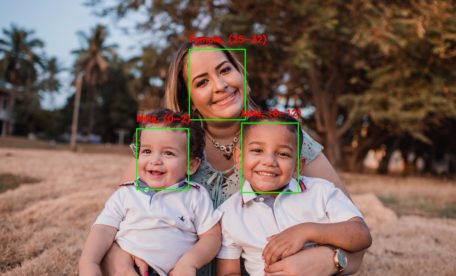
リアルタイム映像から簡単に性別と年齢が推定できるよ!
-

画風変換AIで実写動画をアニメ風動画にしてみたら凄すぎた!
-
AIロボ開発が燃えるカメラはこれだ!車にも取付けてみた!
-
keras yolo V3を高画質ビデオカメラや一眼レフカメラでリアルタイム物体検出する方法
-

Dell G7にUbuntu + YOLO V3をセットアップする方法
-

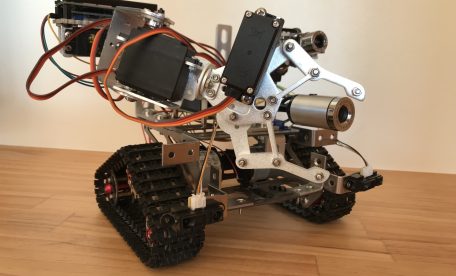
簡単に作成できる自作AIロボットの作り方:足回り編
-
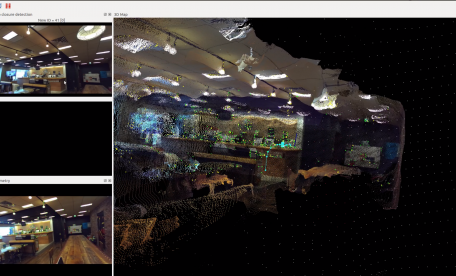
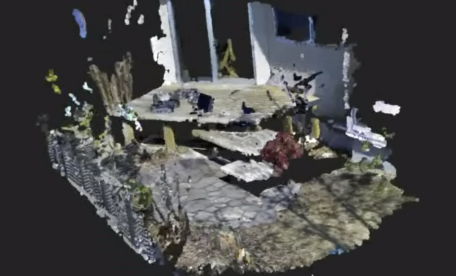
ZED Camera + ROS で簡単3D-SLAM入門
-

AIロボットを作ろう:JetsonTX2(jetpack)セットアップ方法
-

ラズパイで作るROS搭載ロボット:Joystickで遠隔操作してみよう
-

高速化したYOLO V3を使ったリアルタイム物体検出 for PyTorch
-
ラズパイで作るROS搭載ロボット:Ubuntu mate + ROS Kineticのセットアップ手順
-

iphoneで物体検出!TinyYOLO-CoreMLを誰でも使える方法を紹介
-
Disaster onsite crawler
-
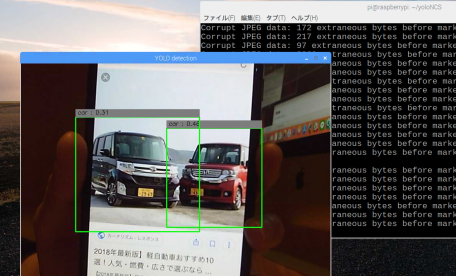
YoloNCSとMovidiusで物体検出を高速化したラズパイ
-
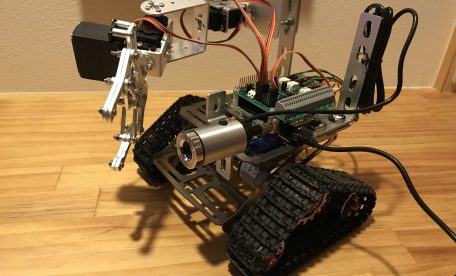
ADRPTB8C制御基盤を使った本格的なロボット開発 for ラズパイ
-
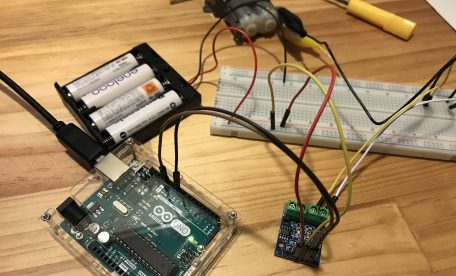
ArduinoでDCモーター/サーボモーターを動かしてみよう!
-
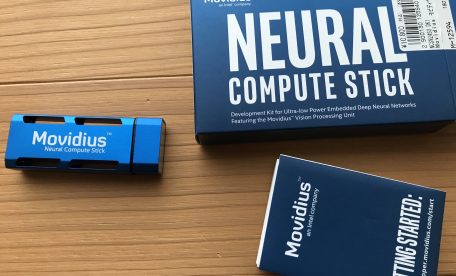
Movidius で画像認識高速化 for ラズパイ
-
Raspberry PiでSSD_Kerasを使った物体検出にチャレンジ!!
-

Raspberry Pi 7″ Touchscreen Displayの組み立て方法
-
ROS環境の準備:iMac2012にubuntu14.04をネイティヴ環境にインストールする方法
-
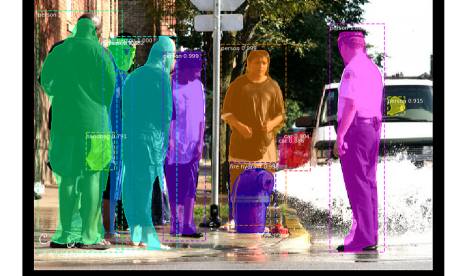
Mask R-CNNを簡単にカメラ映像から試す方法
-

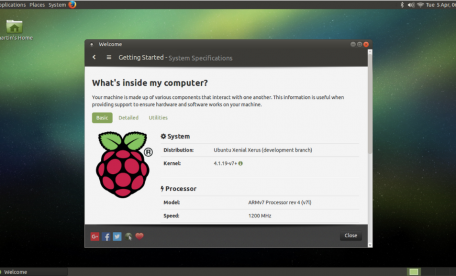
Raspberry Piで始める独自ロボット開発:簡単OS初期設定
-

Raspberry Piで始める独自ロボット開発:パーツ準備編
-

Realtime Multi-Person 2D Pose Estimationを試してみた!
-

すぐ試せる画風変換アルゴリズム chainer-goghが凄すぎる件について
-
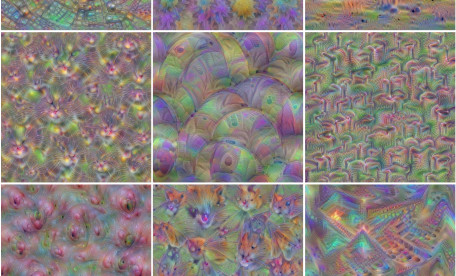
すぐできるDeepDreaming with TensorFlow で画像生成にチャレンジ
-
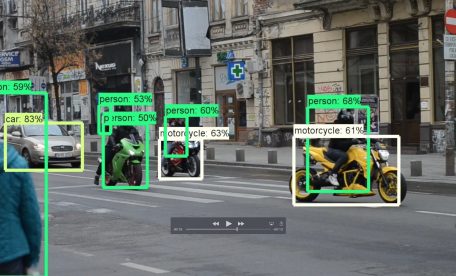
Tensorflow object detectionをリアルタイム映像で使う方法
-

MNISTやCIFAR-10でモデル評価時に間違った画像を確認する方法
-
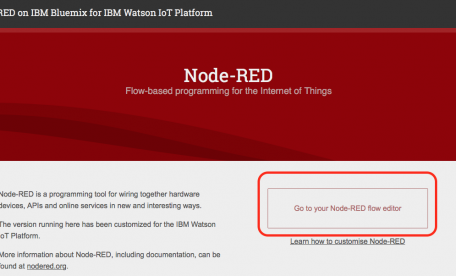
Node-RED + Cloudantを使って簡単にアプリ間連携する方法
-
PROTECT KIDSってどんなロボット?
-

PROTECT KIDS開発始動 2058年販売開始 求む開発協力者!
-

監視カメラから行方不明者(動物も可)を探し出すアプリ
-
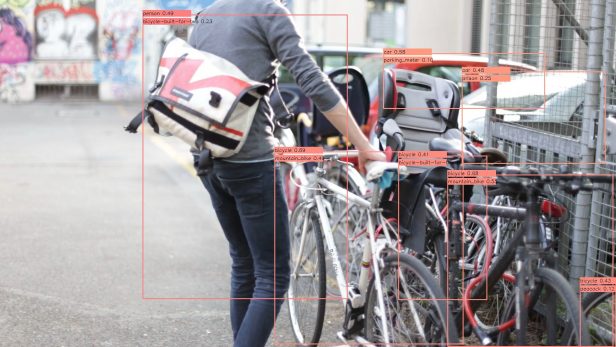
YOLO v2の物体検出とVGG16の画像認識との組み合わせが凄すぎた!
-
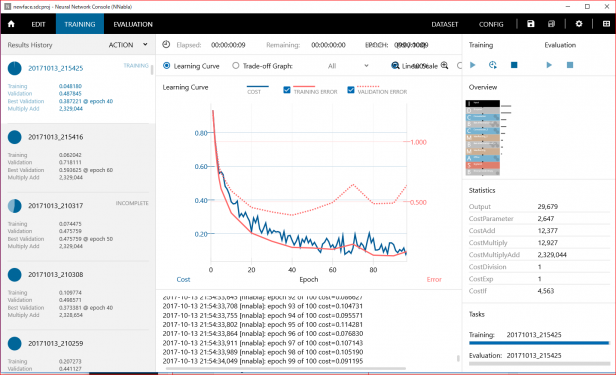
Neural Network Consoleの学習モデル自動最適化機能が凄すぎる!
-

COZMOで楽しくプログラミング!親子で楽しむSTEM教育用ロボット
-

Fine-tuningを使って少ない画像データから効率よく学習モデルを作成する方法
-
YOLOv2のリアルタイム物体検出をTensorFlowとPythonで実装する方法